根据此前航天员出舱后的反馈,这次航天员出舱所使用的工具从重量、材质等都进一步进行了优化,这个舱外操作台跟过去比就轻了四公斤。一般人理解,太空上没有重力,航天员拿起来似乎并没有区别,为什么还要进行这样的调整呢?
航天科技集团五院总装与环境工程部宇航产品设计副主任工程师王哲说:“几个主承力的结构,材质这次进行了一定程度优化,使整体质量,包括它的质心、转动惯量都降低了。因为航天员操作的时候,是扶着它最下边的扶手,舱外操作台的质心越接近手部的位置就越好操作,惯量越小,摆动的时候就更省力。”
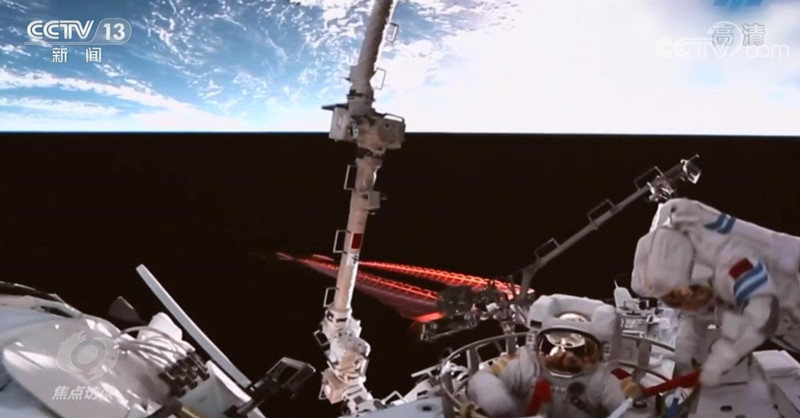
科技人员所进行的一切努力都是为了航天员出舱时更有效率和更安全。这次出舱,有一项任务是安装电缆保护罩,这也是根据前几次航天员出舱时的个体感受进行的改进。
航天员陈冬在打开舱门后,将保护罩仔细地安装在电缆上。随后,航天员出舱的任务有抬升全景相机、安装拓展泵组、舱外自主转移应急返回能力验证等,这几项都是前几次出舱时航天员进行过的。
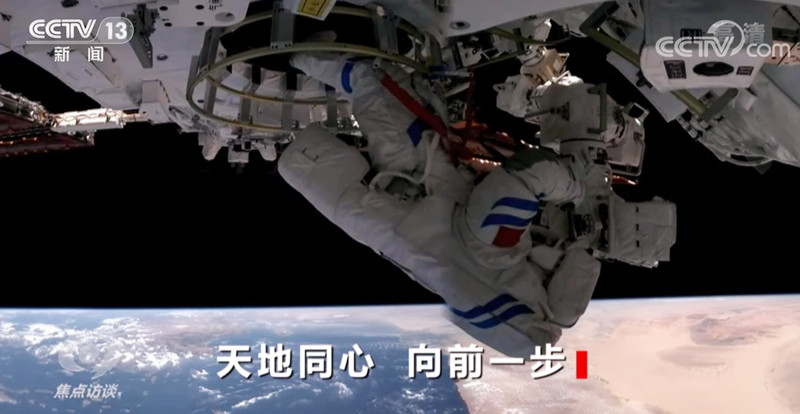
朱光辰说:“因为舱外的摄像机数量比较多,所以每个新的舱段上去都有这个工作,之所以需要人去抬,是因为通过自动装置去实现会增加整个系统的复杂程度,而且航天员在一开始执行舱外活动任务的时候,也应该是循序渐进,从一些比较常规的作业项目开始,完了之后逐渐增加复杂程度。”
出舱任务由易到难,是为了确保万无一失。无论是从流程的设计还是设备工具的改进,中国载人航天的每一点细微进步都源自于航天员的亲身实践和科研人员的精心研制。
这次出舱活动,除了航天员的表现,首次亮相的明星——小机械臂也非常受人关注。此前,神舟十二、十三乘组出舱时都用到了大机械臂,而这次负责舱外运送航天员活动的是小机械臂。核心舱机械臂展开的长度为10.2米,而小机械臂臂长近6米。
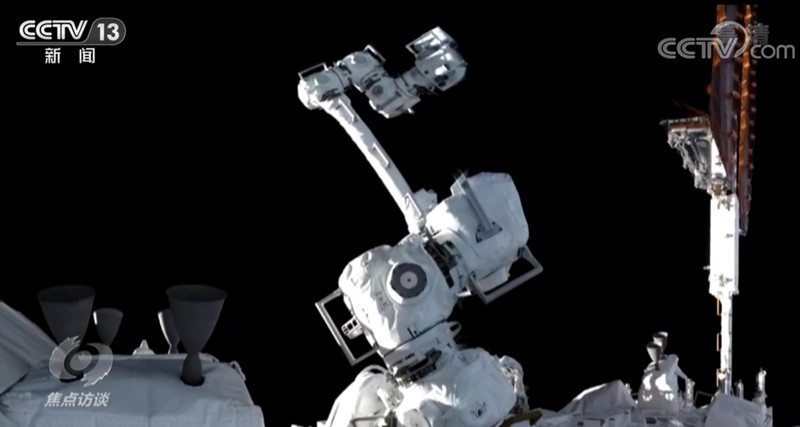
在执行这次出舱任务前,小机械臂在地面人员的支持下顺利完成了在轨测试。这是小机械臂关节1的运动场景,通过关节,小机械臂可以实现类似人类手臂的运动能力,相比大机械臂末端定位精度更高,位置精度优于大臂的五倍,姿态精度优于大臂的两倍。未来,小机械臂还可以与大机械臂形成组合机械臂,成为航天员执行任务的好帮手。
航天科技集团五院空间站总体研究室主任王为说:“小机械臂不能转位,但它可以转移航天员,出舱的时候,航天员可以站在小机械臂上去运动,现在航天员可以站在大机械臂上,也可以站在小机械臂上,甚至未来的话可以让大机械臂和小机械臂连成一个15米长的组合臂,站在组合臂上进行更大范围的转移。”